Durch das automatische Differenzieren (autoDiff) ist es Programmen möglich mathematische Funktionen abzuleiten. Je nach Anwendungsfall kann dabei vorwärts oder rückwärts differenziert werden. Ich erkläre anhand eines Beispiels beide Vorgehensweisen und gehe auf die Vor- und Nachteile ein.
(1) 
Die obige Formel soll durch einen Algorithmus differenziert werden. Für ein Computerprogramm ist dies nicht so einfach, wie es zunächst scheint. Alle Rechenoperationen müssen einzeln mit Hilfe von elementaren Operationen ausgeführt und in Zwischenschritten abgespeichert werden.
n1 = x * x n2 = 2 * x n3 = sin(y) n4 = n1 + n2 n5 = n4 + n3
In dem gezeigten Beispiel werden 5 Zwischenschritte benötigt um die Formel zu berechnen. Der Benutzer kann daraufhin die Variablen  und
und  initialisieren und das Ergebnis berechnen lassen.
initialisieren und das Ergebnis berechnen lassen.
Vorwärts-Modus
Um die oben gezeigte Formel zu differenzieren werden ebenfalls elementare Rechenoperationen benötigt, damit ein Algorithmus damit umgehen kann. Um dies zu ermöglichen wird auf die Kettenregel zurück gegriffen.
(2) 
Die Kettenregel lässt uns die gesamte Formel in einzelnen Schritten differenzieren. Genau das ist von Vorteil für ein Algorithmus, der eine Funktion ebenfalls in einzelnen Rechenschritten ausführt.
Ein Algorithmus könnte die oben gezeigte Formel wahlweise nach oder differenzieren. Dies ist für zwei Variablen noch vertretbar. Sobald eine Formel jedoch aus Hunderten Variablen besteht nicht mehr performant. Um dieses Problem zu lösen wird eine neue Variable  eingeführt und und als Funktionen dieser angesehen.
eingeführt und und als Funktionen dieser angesehen.
(3) 
Die einzelnen Rechenoperationen lassen sich anschließend nach differenzieren.
(4) 
Das daraus resultierende Programm lässt sich wie folgt darstellen:
dn1 = 2 * x * dx dn2 = 2 * dx dn3 = -cos(y) * dy dn4 = dn1 + dn2 dn5 = dn4 + dn3
Soll nun die partielle Ableitung nach berechnet werden, so muss  die identische Abbildung von sein und alle übrigen Funktionen müssen unabhängig von sein. Dadurch wird
die identische Abbildung von sein und alle übrigen Funktionen müssen unabhängig von sein. Dadurch wird  ,
,  und
und  . Als Beispiel möchten wir die Ableitung nach an der Stelle
. Als Beispiel möchten wir die Ableitung nach an der Stelle  berechnen.
berechnen.
dn1 = 2 * 3 * 1 dn2 = 2 * 1 dn3 = -cos(2) * 0 dn4 = dn1 + dn2 //6 + 2 dn5 = dn4 + dn3 //8 + 0
Der Algorithmus kann die benötigten Variablen initialisieren und das gewünschte Ergebnis berechnen. Um die Ableitung für zu berechnen setzt man  und
und  .
.
Durch die Substitution mit muss nur einmal Differenziert werden. Der Wert der Ableitung kann für eine bestimmte Variable anschließend an jeder Stelle der Funktion berechnet werden. Muss eine Ableitung nach einer einzelnen Variable an vielen Stellen berechnet werden, so empfiehlt sich der Vorwärts-Modus. Man spart sich zwar das mehrmalige Differenzieren, ein großer Nachteil besteht jedoch darin, dass die Funktionswerte der Ableitung pro Variable berechnet werden müssen. Die Funktionswerte der partiellen Ableitungen nach und können nicht gleichzeitig berechnet werden.
Rückwärts-Modus
Der Rückwärts-Modus erlaubt es alle partiellen Ableitungen einer Funktion gleichzeitig zu berechnen. Dies ist jedoch nur an einer vorher definierten Funktionsstelle möglich. Für unser Beispiel entscheiden wir uns für die Werte  und
und  . Der Algorithmus arbeitet in zwei Schritten. Zuerst werden dabei die Funktionswerte für alle Rechenschritte berechnet. Im Zweiten Schritt wird mit Hilfe dieser die jeweilige Ableitung der Funkion ermittelt.
. Der Algorithmus arbeitet in zwei Schritten. Zuerst werden dabei die Funktionswerte für alle Rechenschritte berechnet. Im Zweiten Schritt wird mit Hilfe dieser die jeweilige Ableitung der Funkion ermittelt.
Die Funktionswerte zu berechnen ist für ein Computerprogramm nicht schwer. Die einzelnen Schritte werden zur Veranschaulichung nicht mehr als Rechenoperationen, sondern als Graph dargestellt.
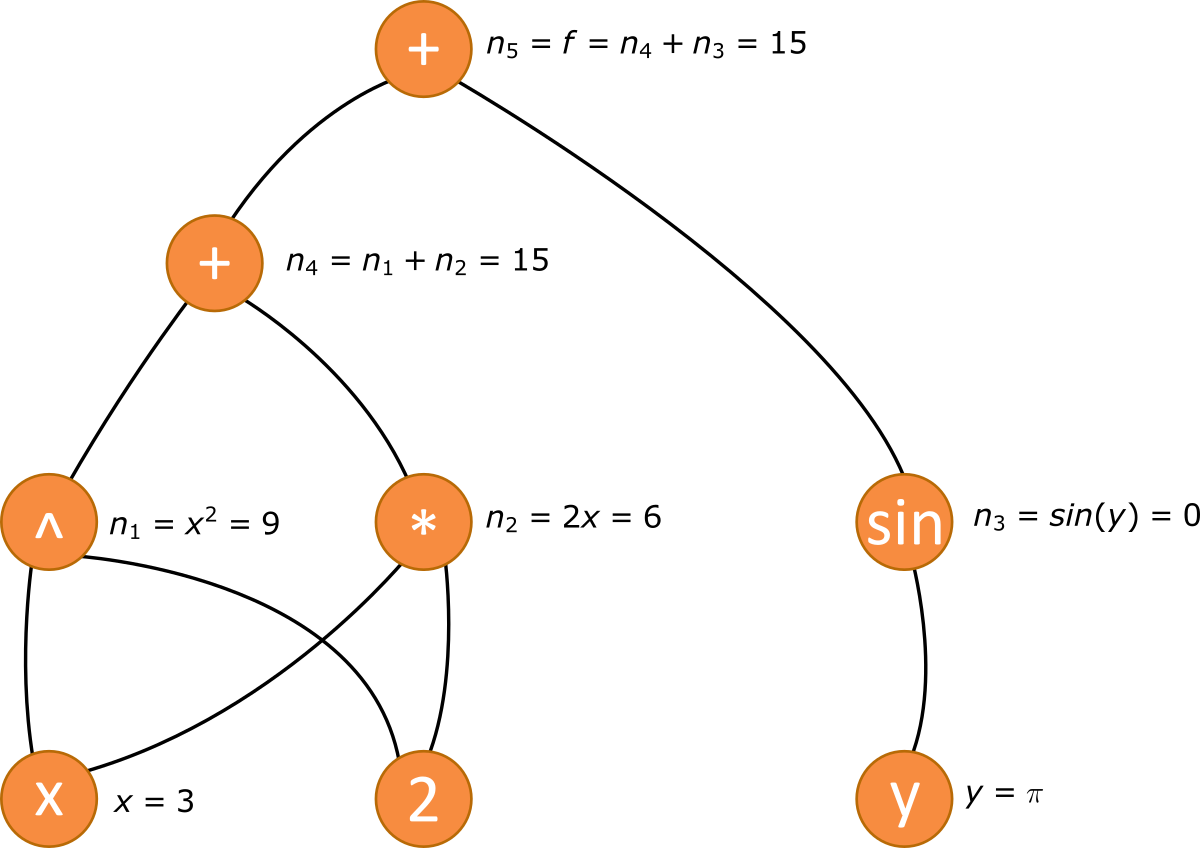
Sobald alle Funktionswerte berechnet sind können die partiellen Ableitungen berechnet werden. Dies geschieht in umgekehrter Reihenfolge und für jeden Eingang in einen Knoten einzeln.
Der erste Knoten ist beispielsweise  . Die Ableitungen können dabei sofort berechnet werden und müssen nicht mehr in Abhängigkeit einer Eingangsvariable stehen, da alle Funktionswerte bereits bekannt sind.
. Die Ableitungen können dabei sofort berechnet werden und müssen nicht mehr in Abhängigkeit einer Eingangsvariable stehen, da alle Funktionswerte bereits bekannt sind.
(5) 
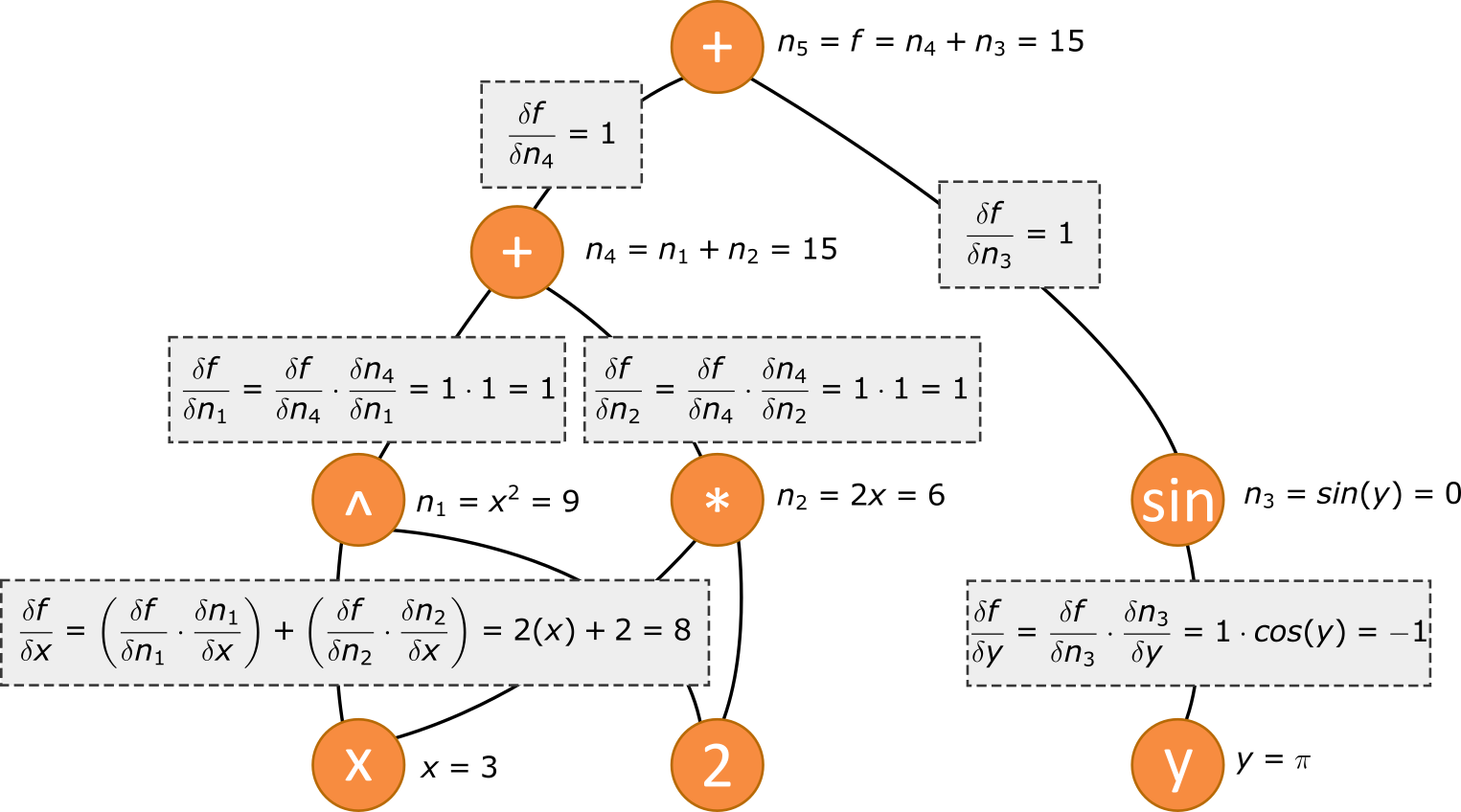
Auch hierbei muss die Kettenregel angewandt werden. Für die Ableitung nach  wird das Ergebnis aus
wird das Ergebnis aus  benötigt.
benötigt.
(6) 
Das ganze ist ziemlich simpel und entspricht einfach nur einer absteigenden Abarbeitung im Graphen. Hat ein Knoten, wie beispielsweise , zwei Eingänge, so wird nach beiden Eingängen ( und  ) separat die Ableitung gebildet. Besitzt ein Knoten zwei Ausgänge, so müssen beide Ableitungen addiert werden. Dies wird beispielsweise für gemacht.
) separat die Ableitung gebildet. Besitzt ein Knoten zwei Ausgänge, so müssen beide Ableitungen addiert werden. Dies wird beispielsweise für gemacht.
Bei dem Rückwärts-Modus erhält man für alle Variablen die Funktionswerte der partiellen Ableitungen. Er eignet sich besonders für Aufgaben bei denen man an einer bestimmten Funktionsstelle alle partiellen Ableitungen benötigt. Ein Beispiel hierfür ist die Berechnung des Gradienten einer Fehlerfunktion, wie sie in neuronalen Netzen zum Einsatz kommt. Ohne auf Näherungen angewiesen zu sein kann durch automatische Differenzierung die Ableitung von Fehlern für hunderte Features gleichzeitig berechnet werden.